I got back onto the points this morning and after a fair bit of messing about figured out that you have to program the Arduino with the points it will switch using this command
<T id addr offset>
for each of the points where id is the id referenced in the controller and addr and offset are the physical address of the point. Once they are all set, then issue
<E>
to write the data to the Arduino EEPROM.
These values can be written using the serial monitor in the Arduino software.
Doing this enables the Controller to send <T id n> to the base station to activate the point servo with ID id where n is 1 or 0 to set or unset the point.
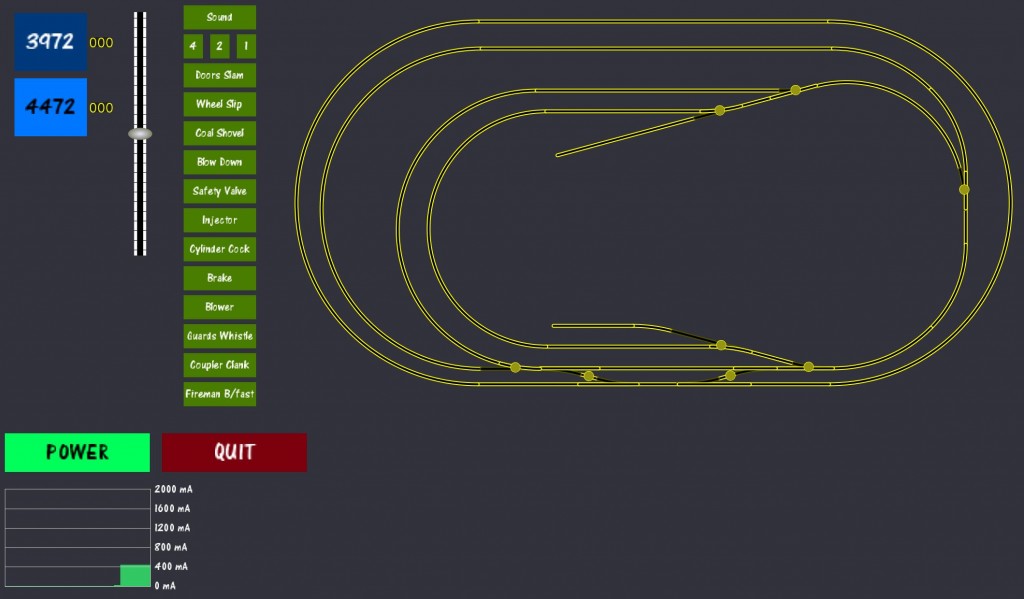
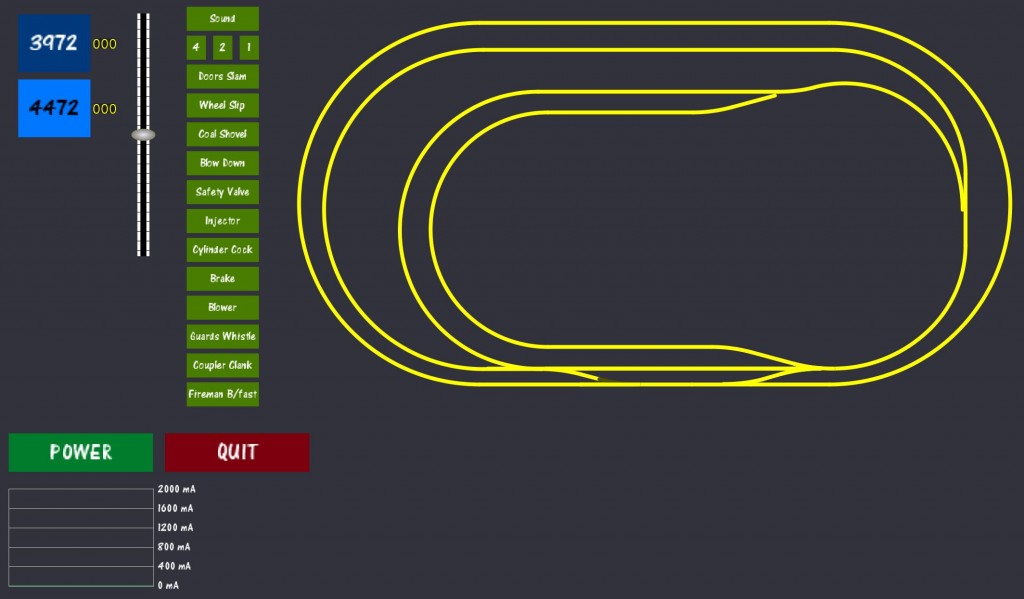
The controller software now looks like this. I’ve changed the look of the track (so it looks more like track) and I’ve made the switches show up on the layout so I can see where to click.